Paint Room Conveyor Product Adapter
Mechanical Design & Testing

Overview
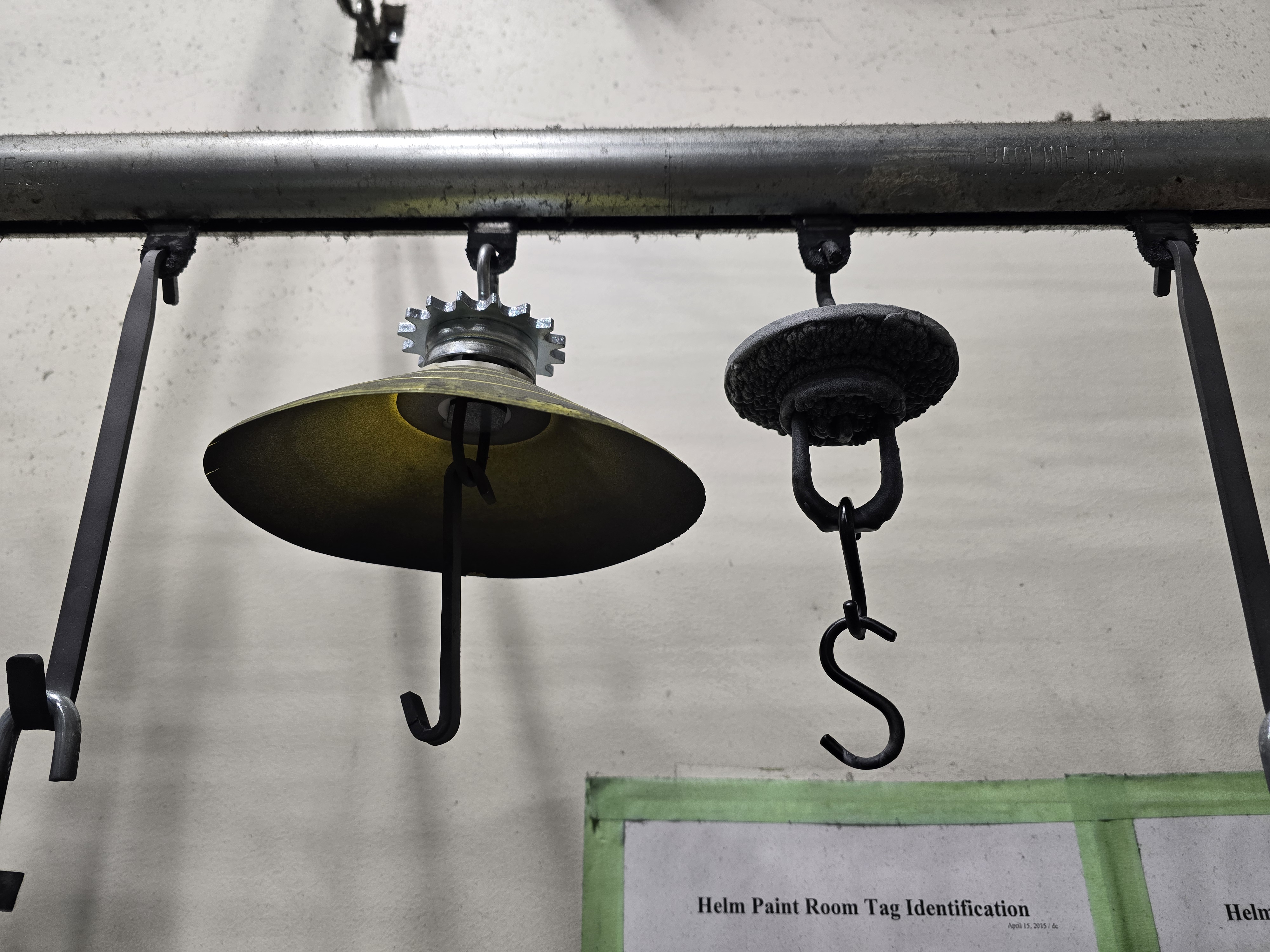
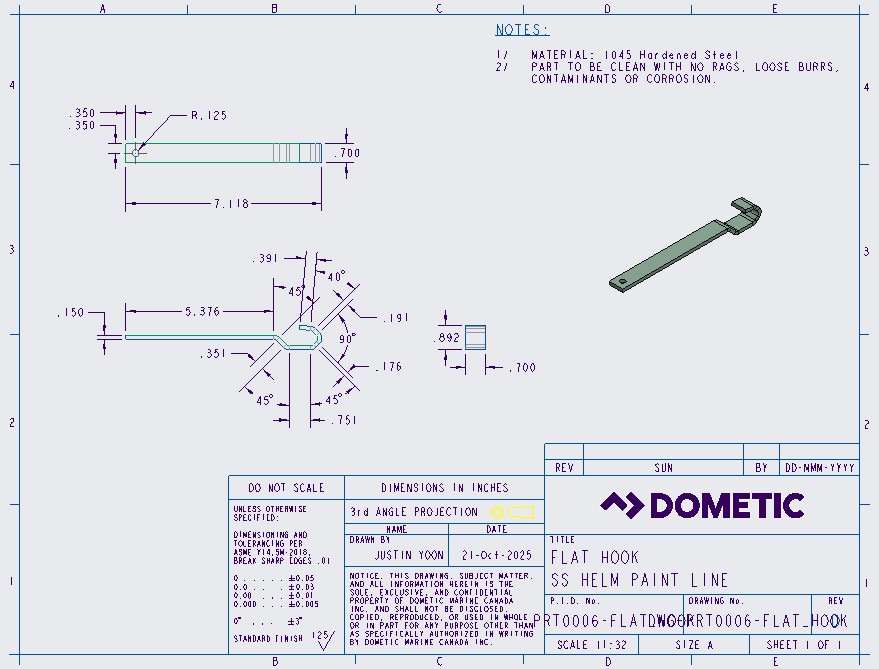
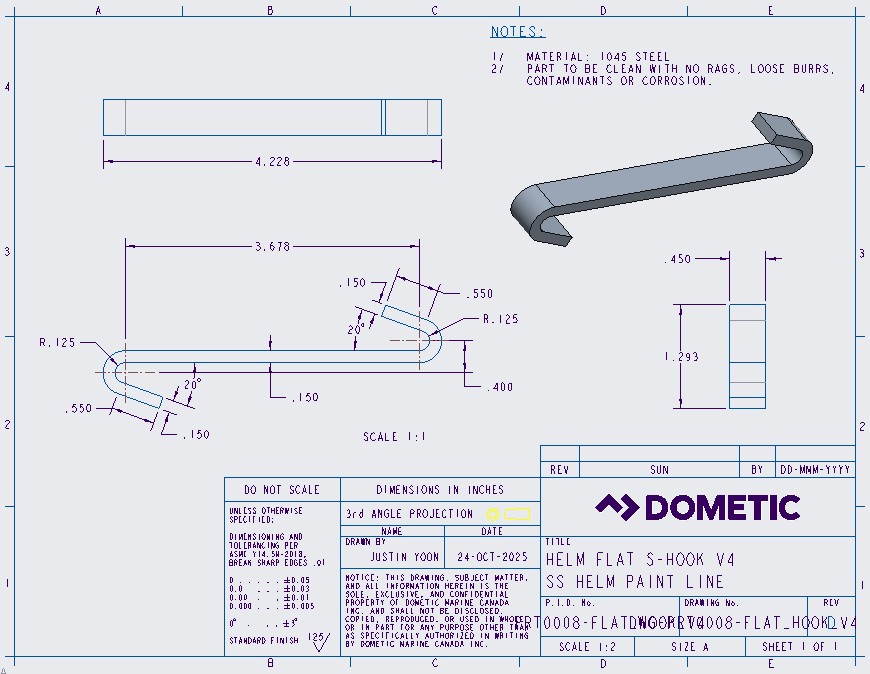
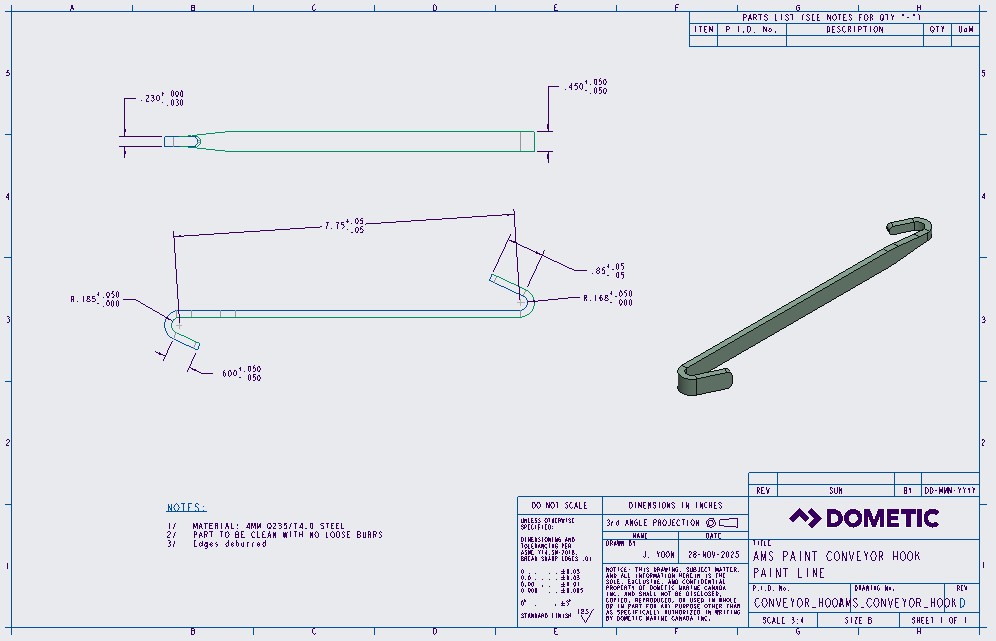
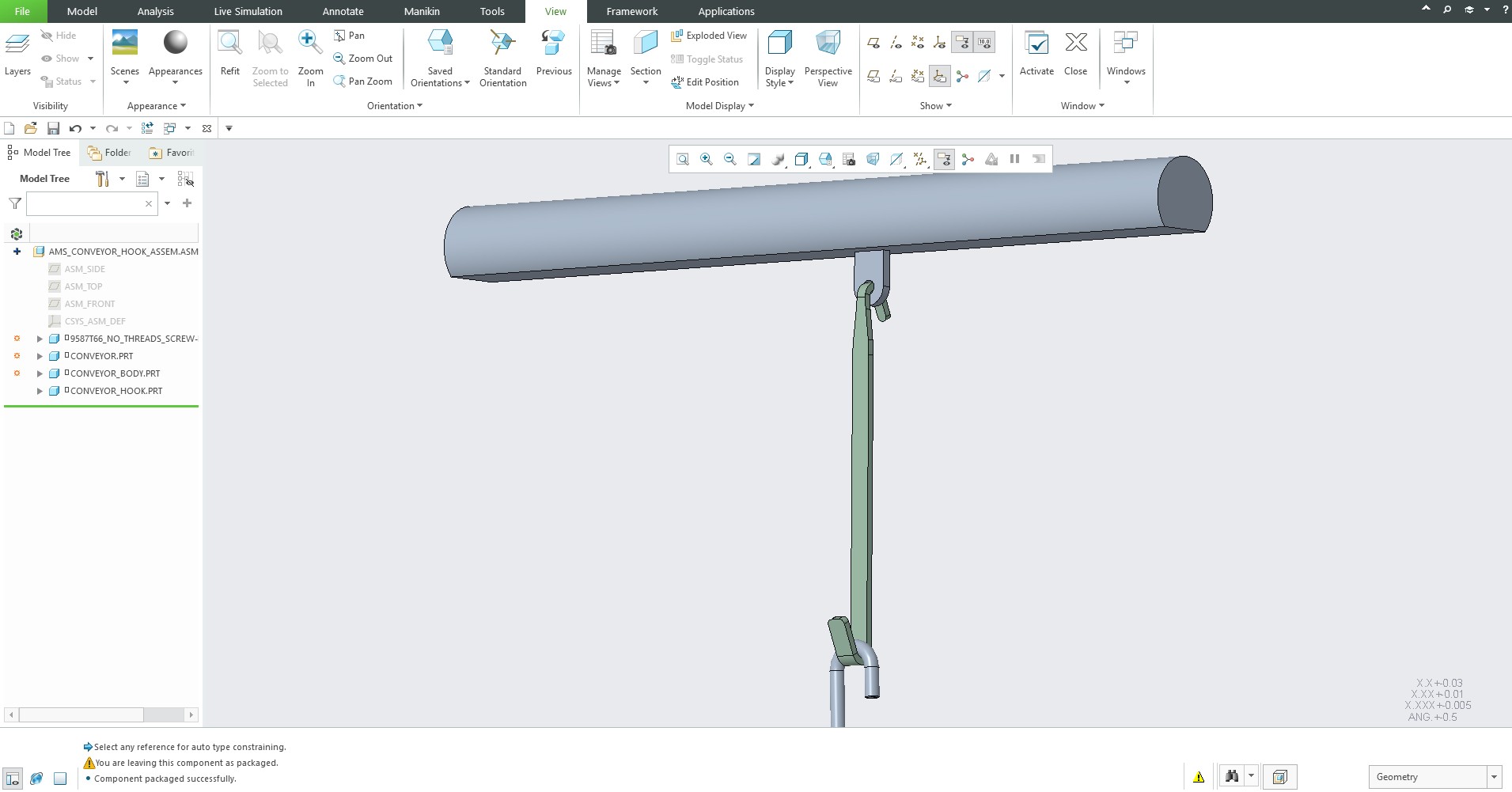
To support the integration of an industrial painting robot into the company's manufacturing process, I designed and implemented a custom hook system for conveyor-mounted parts in the paint room. The goal was to enable consistent, secure, and repeatable positioning of products throughout the automated painting process. Previously, operators have been using 2 S-hooks to position the products relative to the paint robot. This allowed for unwanted product rotation during the painting process, introducing uncertanties, overspray, and poor surface finish. I developed hook designed to fit a range of products, ensuring proper orientation, clearance, and stability during conveyor motion and robotic spray cycles. The design accounted for load distribution, ease of loading/unloading, and compatibility with existing conveyor infrastructure. Material selection were also considered to withstand paint buildup, chemical exposure, and repeated use. This system improved overall process efficiency by reducing manual work by the operators, minimizing operator human error and simplifying loading process, and ensuring consistent paint coverage. This project was important to integrating robotic operation and scaling up production throughput in the paint room.
Key Deliverables
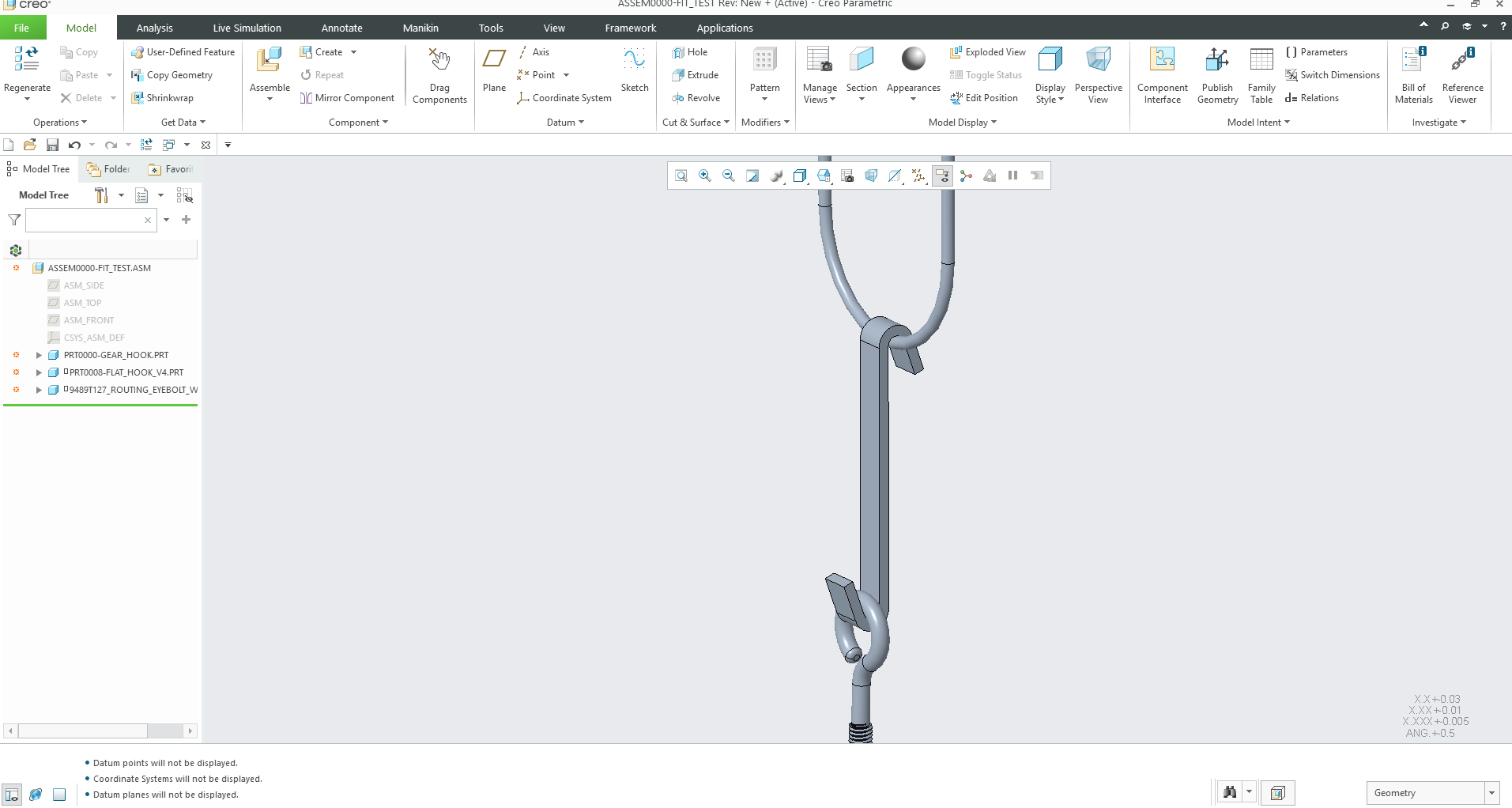
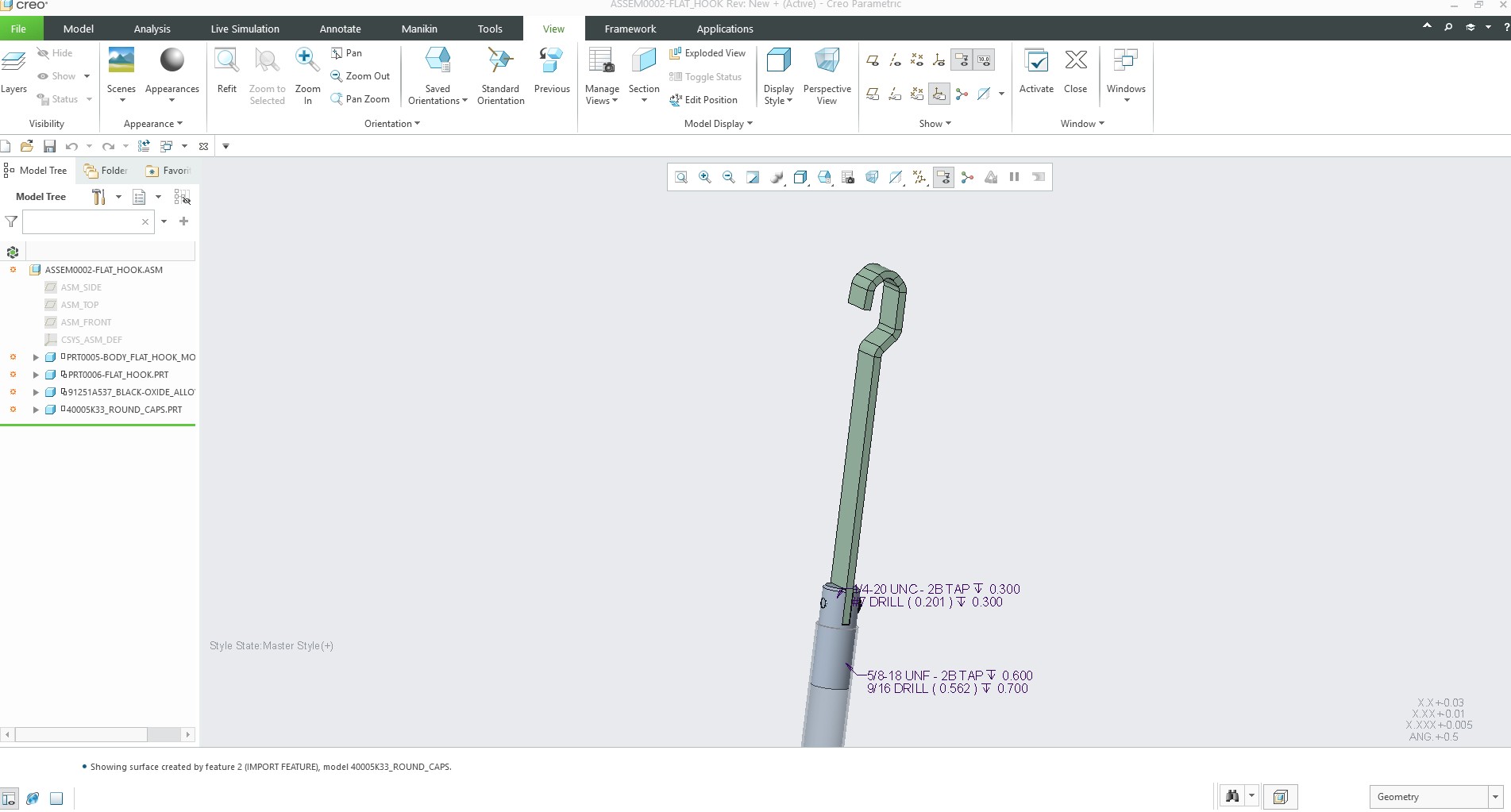
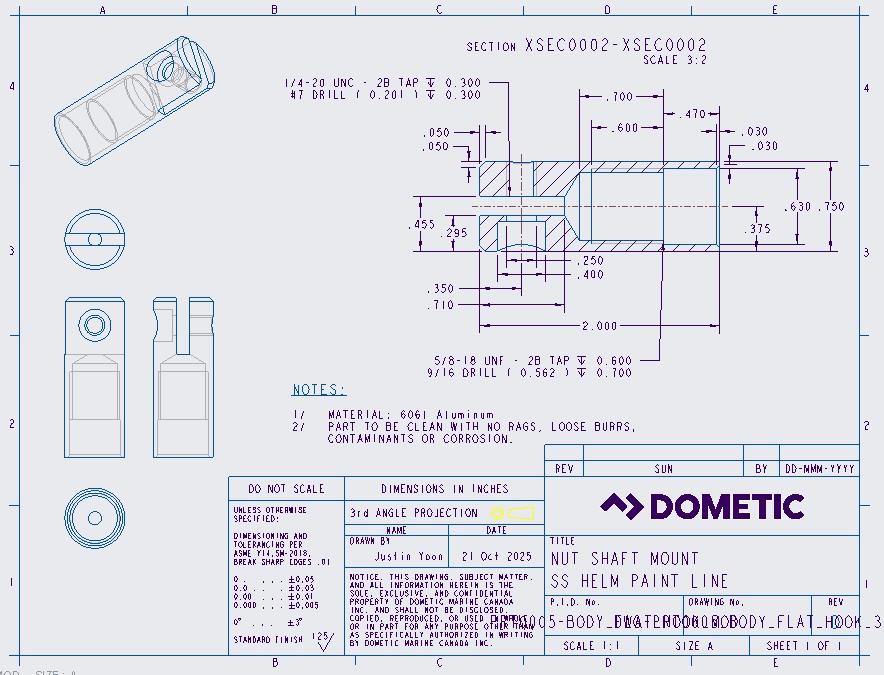
- 3D CAD Modeling (Creo Parametric)
- FEA Analysis of failure points
- Rapid Prototyping
Role
Manufacturing Engineering Co-op
Tools
Creo Parametric
Technical Documentation & Gallery